Frame Rate Up Conversion (FRUC), Frame Interpolation
FRUC(Frame Rate Up Conversion) : 영상열에 일정한 주기로 추가적인 프레임을 삽입 하여 단위 시간당 출력되는 프레임의 수를 증가 시키는 기법이다. 기존의 방법은 움직임 추정 기법에 따라 단방향 움직임 추정(Unilateral Motion Estimation, UME)과 양방향 움직임 추정(Bilateral Motion Estimation, BME)으로 나뉜다. UME에서는 정확한 움직임 추정이 가능하나 overlap과 hole과 같은 문제점이 존재하고, BME에서는 overlap과 hole과 같은 문제는 없지만 부정확한 움직임 추정으로 인한 화질 저하가 발생한다. 이러한 문제를 해결하기 위해 UME와 BME 기법을 동시에 사용하는 Hybrid Bilateral Motion Estimation 방법을 제안하였다.
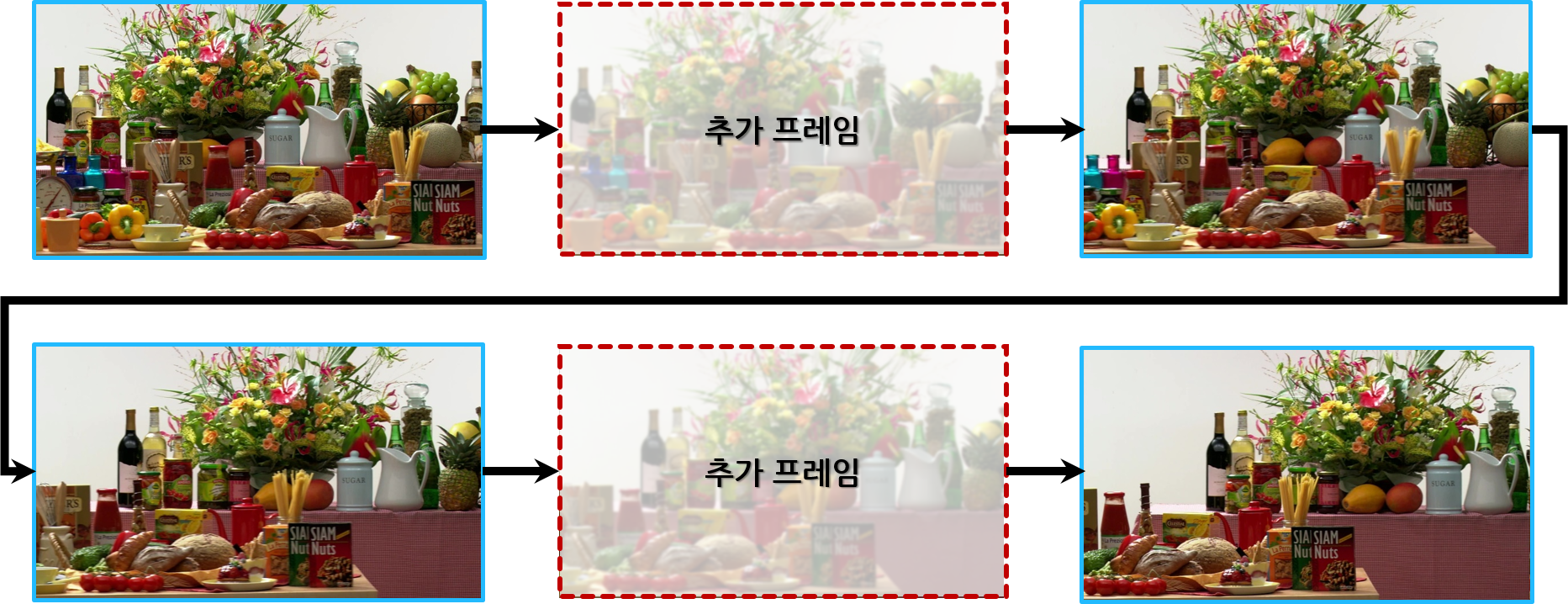
Fig5-1. Concept of FRUC
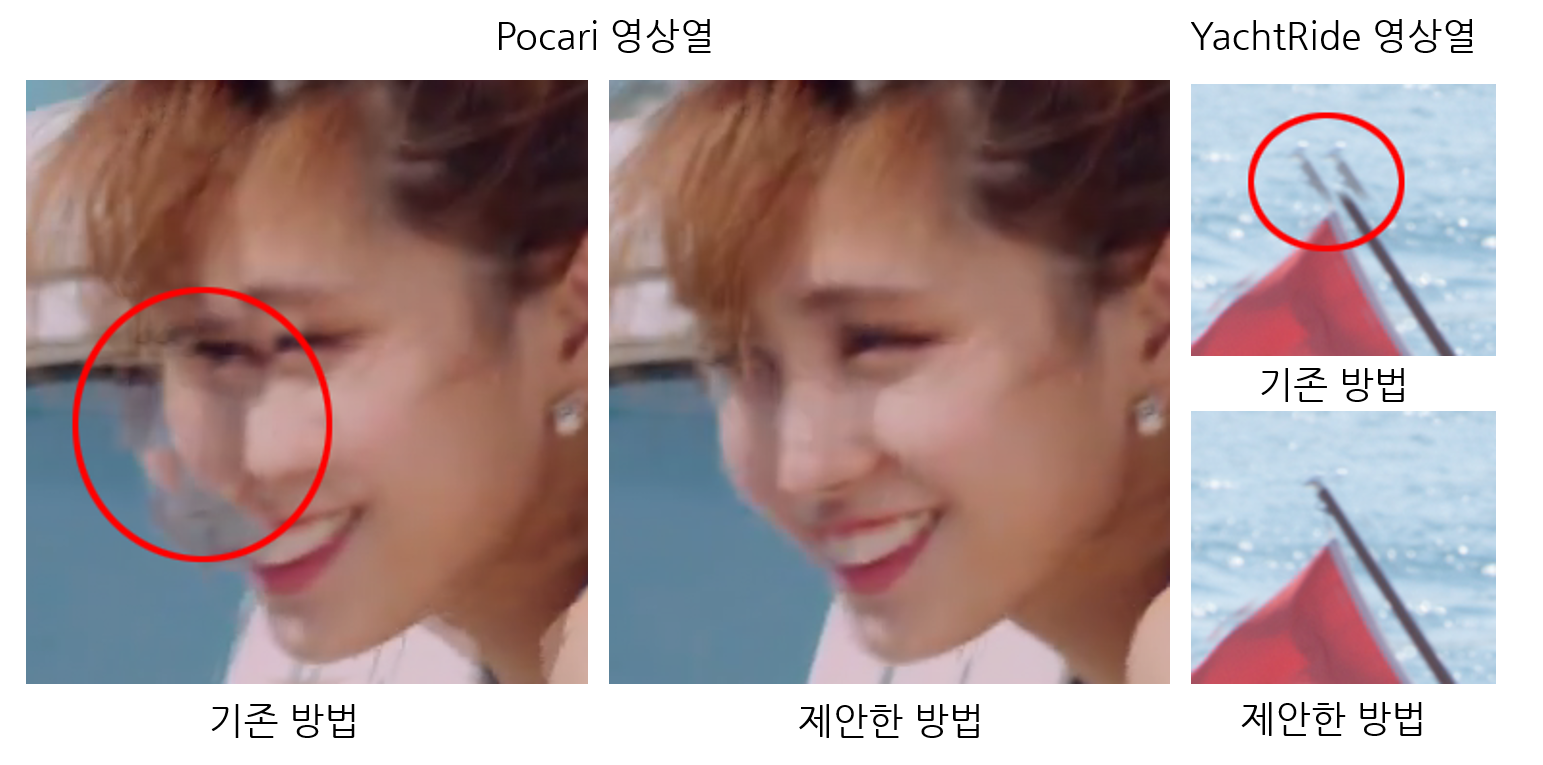
Fig5-2. 기존 방법과 제안한 방법 성능 비교(주관적 평가)
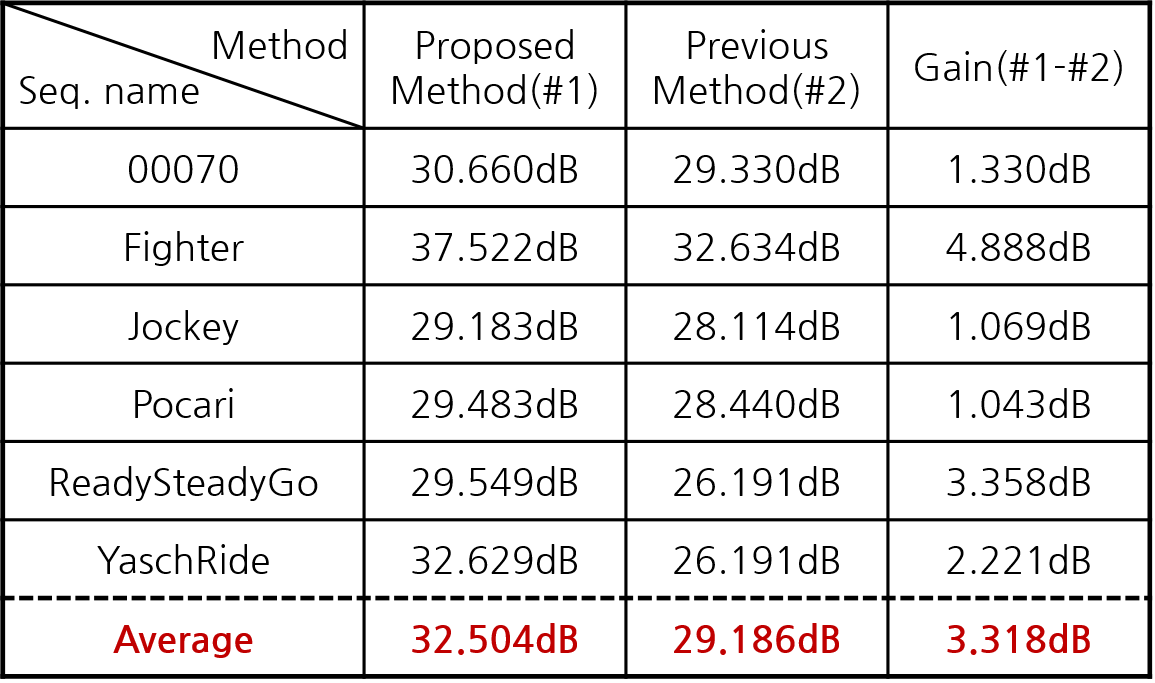
Fig5-3. 기존 방법과 제안한 방법 성능 비교(PSNR)
Video. 기존 방법(좌), 제안 방법(우)
Visual odometry and SLAM
SLAM(Simultaneous Localization and Mapping) : 로봇이 자신의 위치와 주변 지도를 동시에 추정하는 기법으로, GPS를 사용할 수 없는 환경에서도 동작이 가능하다는 장점이 있다. SLAM은 추적 및 매칭에서 발생하는 오차가 성능에 큰 영향을 미친다. 이러한 문제를 해결하기 위해 RAFSet SLAM을 제안하였다.
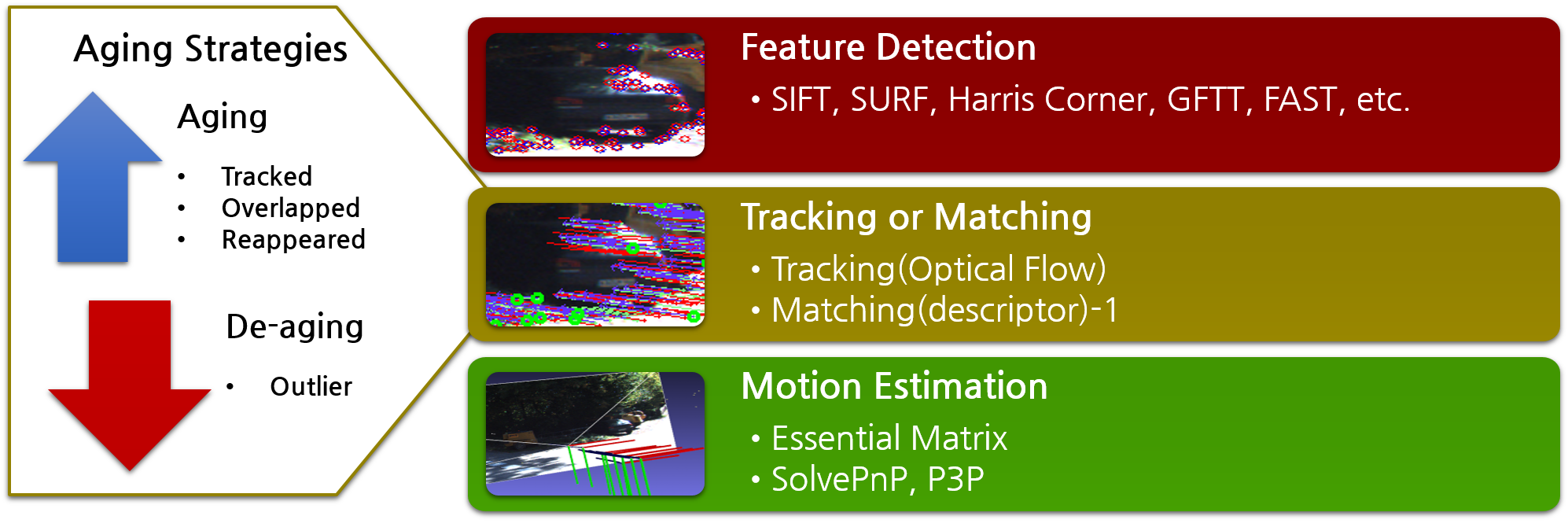
Fig1-1. Concept of RAF(Robust Aged Feature)
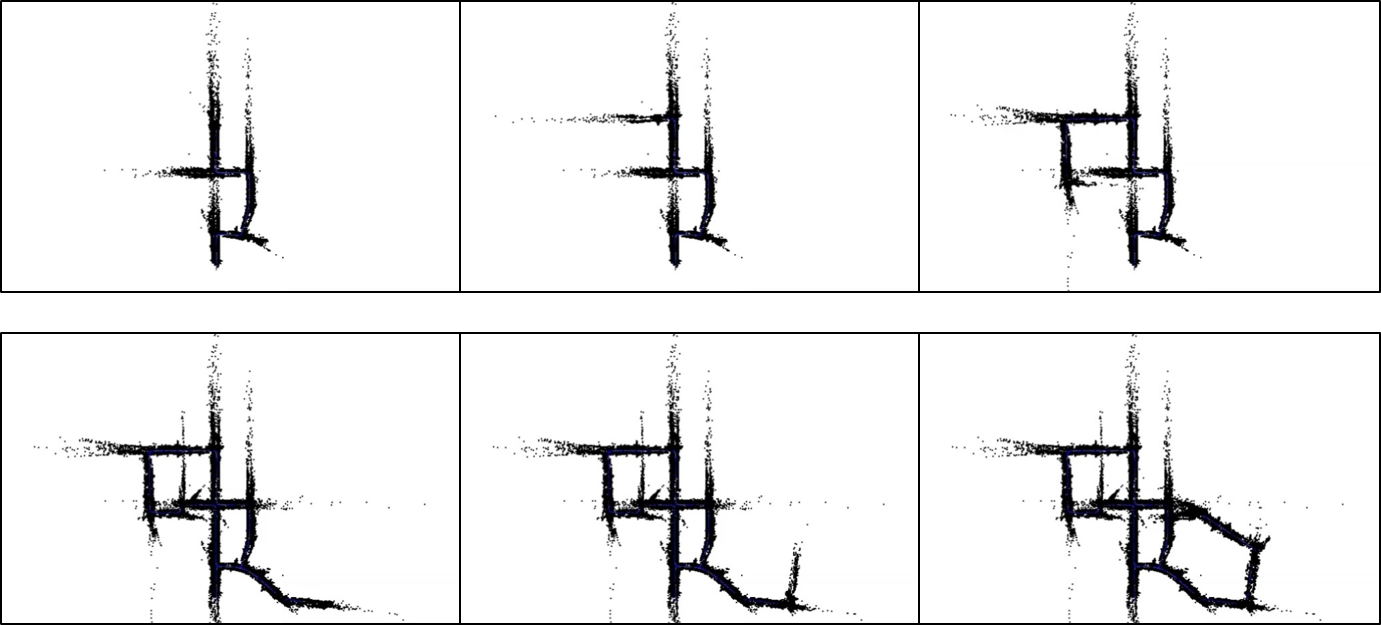
Fig1-2. RAFSet SLAM Results
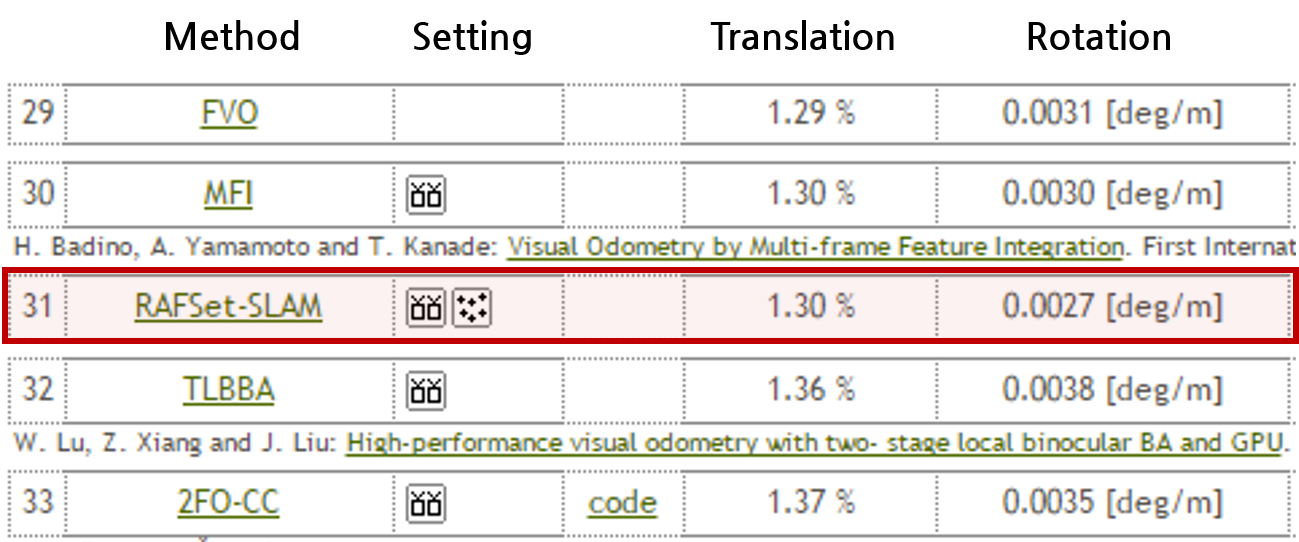
Fig1-3. KITTI Visual Odometry 부문 31위 (17.07.13)
딥러닝(적대적 생성 네트워크, GAN)
GAN(Generative Adversarial Networks) : 대표적인 비지도 학습(Unsupervised Learning)중 하나로 생성자(Generator)와 구별자(Discriminator)의 경쟁(Minimax problem)을 통해 이미지를 생성한다.
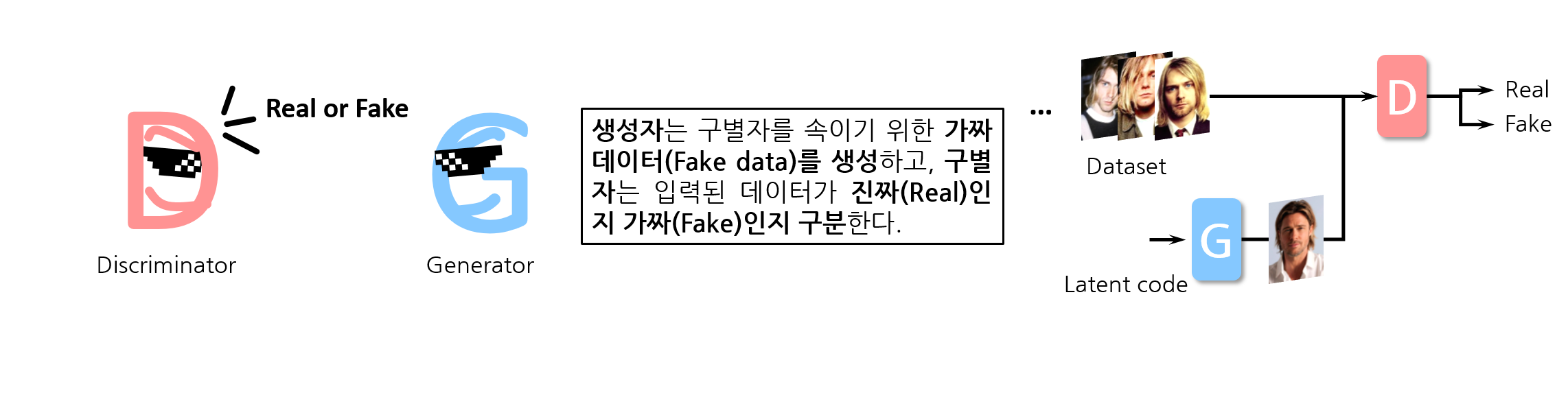
Fig2-1. Concept of GAN

Fig2-2. GAN Results
De-Hazing
De-Hazing : 안개나 해무, 옅은 구름 등으로 인해 발생하는 열화를 개선하는 기법으로, 기존의 DCP(Dark Channel Prior) 기반의 알고리즘의 경우 짙은 안개에 취약하다는 단점이 있다. 이러한 문제를 해결하기 위해 HLS 컬러 공간 기반의 안개 제거 기법을 제안하였다.
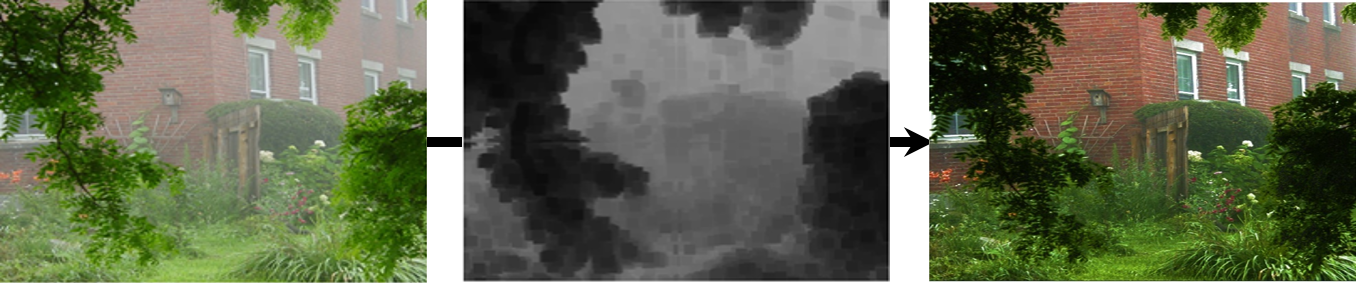
Fig3-1. Concept of De-Hazing

Fig3-2. HLS 컬러 기반의 안개 제거 성능 (입력, 출력)
Intensity Enhancement (Retinex)
Intensity Enhancement : 역광현상이나 부족한 광원의 세기로 인해 발생하는 열화를 개선하는 기법으로, 기존의 MSR의 경우 각 채널을 독립적으로 연산하여 원본의 색상 정보를 왜곡하고, 채도가 다소 떨어진다는 단점이 있다. 이러한 문제를 해결하기 위해 MSRMS(MSR with Modified contrast and Saturation correction)를 제안하였다.

Fig4-1. Concept of MSR
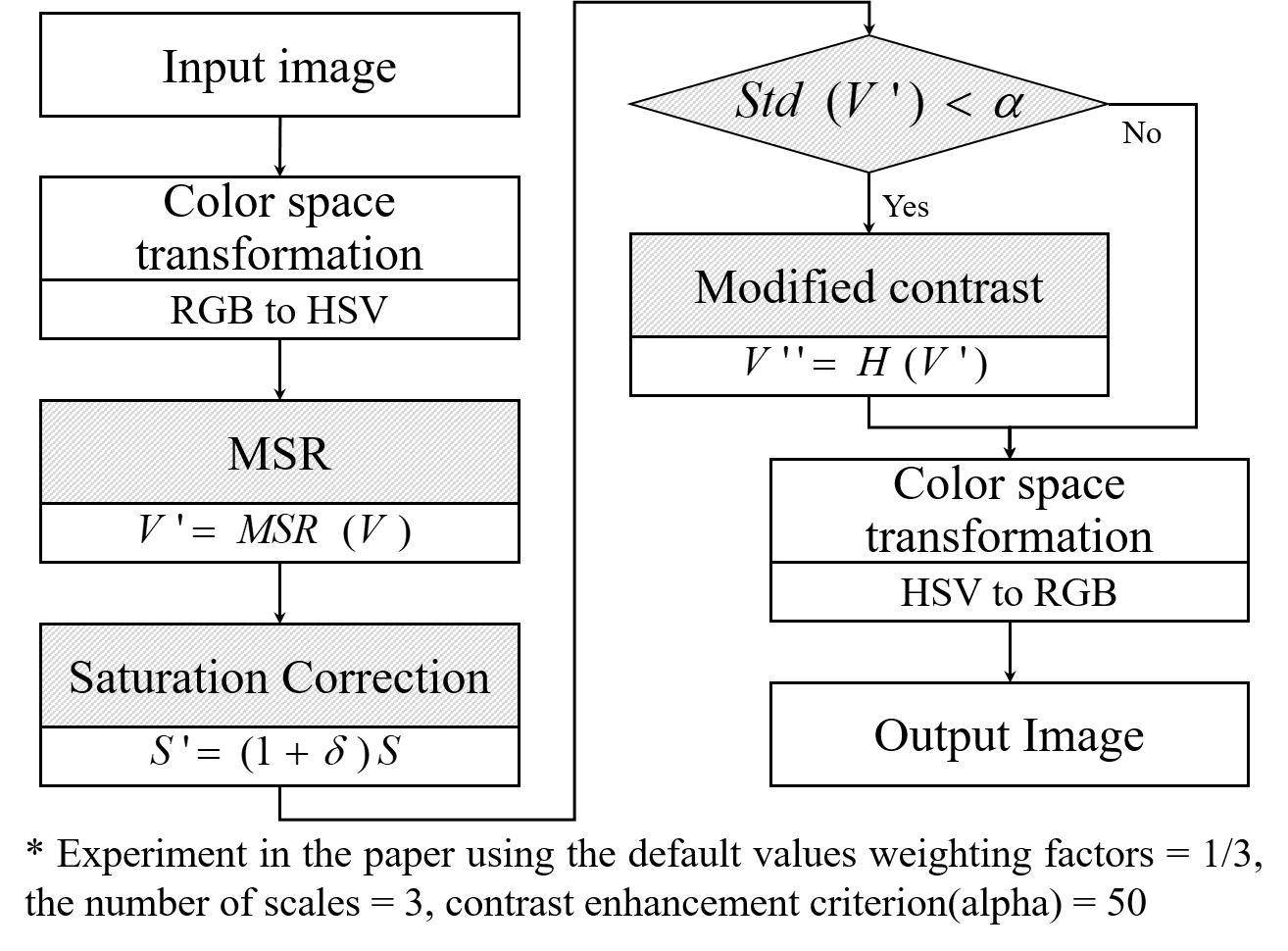
Fig4-2. Flow chart of MSRMS

Fig4-2. MSRMS의 성능 (입력, 출력)
3D Reconstruction (Active Stereo Vision)
Active Stereo Vision : 두 대의 카메라를 이용하여 깊이 정보를 획득하는 스테레오 비전 기법에 추가적인 광원을 배치하여 성능을 향상 시키는 방법이다.
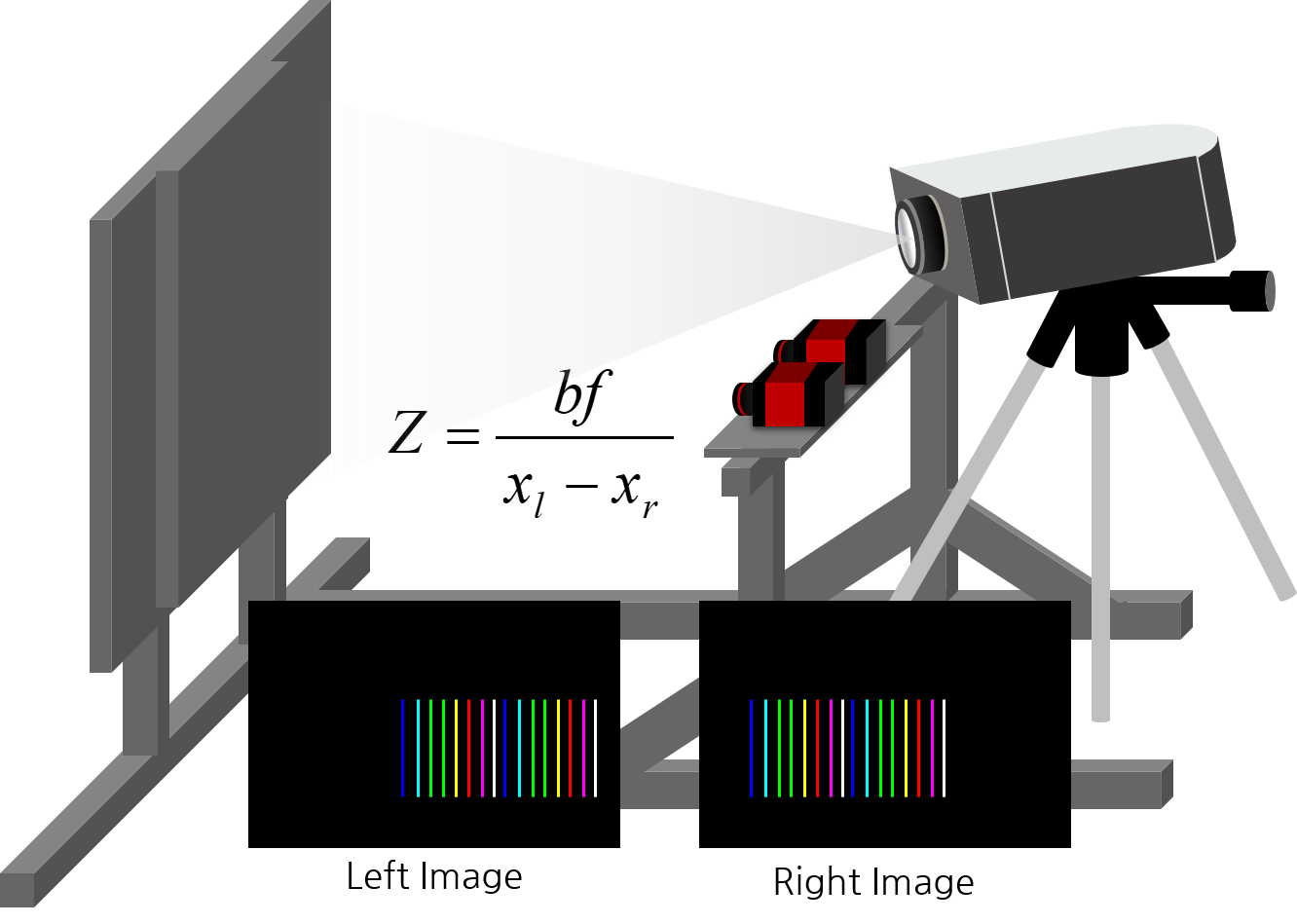
Fig6-1. Concept of Active Stereo Vision

Fig6-2. Depth Map 예시 (입력, 깊이 맵)
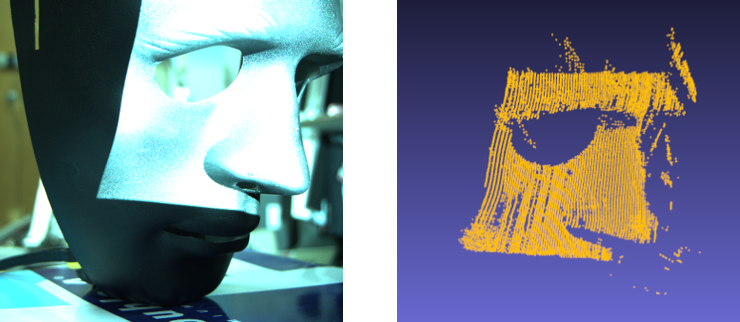
Fig6-3. 3D reconstruction results of mask (입력, 3차원 복원)
천장 지향 2D-LiDAR를 이용한 공간 정보 획득 및 위치 추정
LiDAR(Light Detection and Ranging) : 빛이 물체에 반사되어 돌아오는 시간을 이용해 거리를 측정하는 센서이다. 2D-LiDAR를 회전하여 3차원 정보를 획득하고, 기존의 3D-LiDAR에 비해 높은 공간해상력을 획득하는 방법을 제안한다.
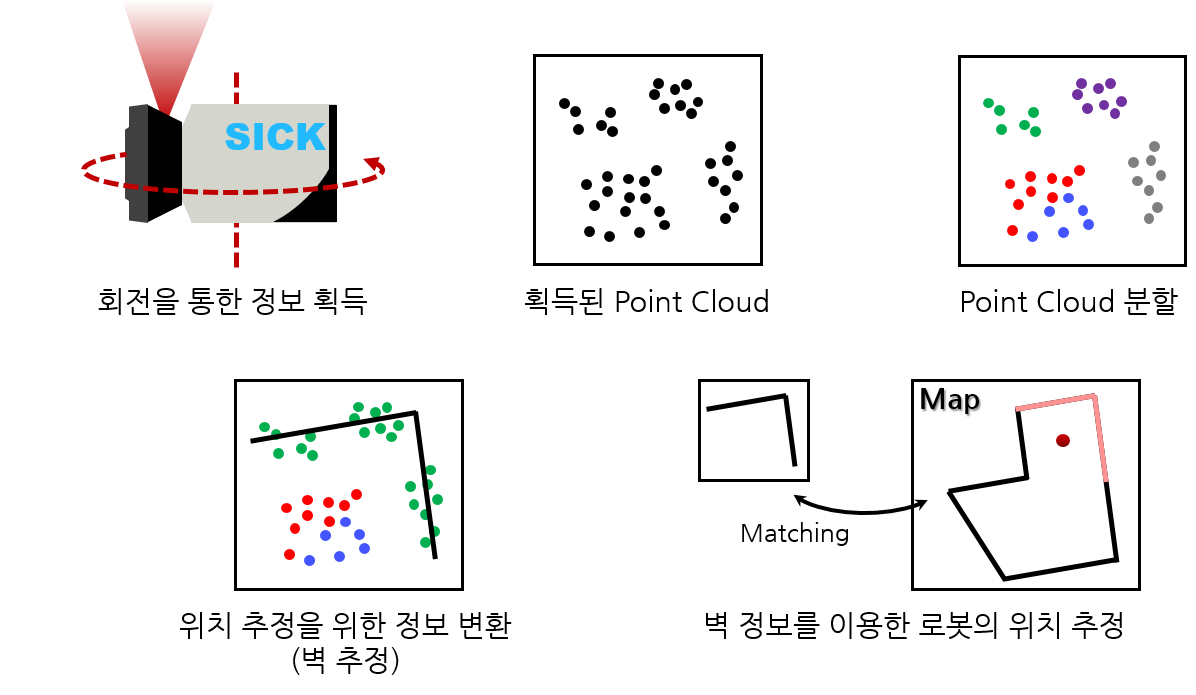
Fig7-1. 천장 지향 LiDAR 위치 추정 개념
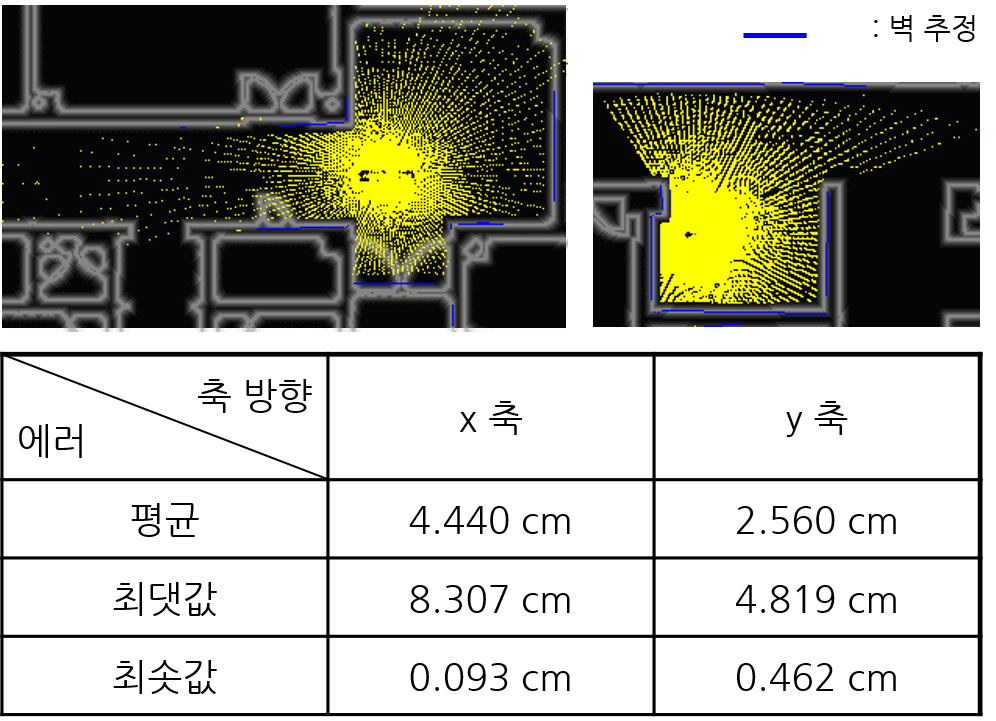
Fig7-2. 벽 추정 결과 및 위치 추정 에러